There is not much difference but I actually like the original “Pokitto” best, because there is a bigger contrast and clear line between light and shade areas. That gives it more depth in my opinion.
For colouring I’ve got a system of ‘shades’ where 1 ‘shade’ is 0b0001000 (or 0x08) in RGB888 terms (which is the ‘epsilon’ of R and B in RGB565).
This allows me to lighten or darken images by adjusting the ‘shade’ of every colour used and to increase contrast by changing the step between ‘shades’.
The two ships I had before were 2 ‘shades’ apart for each colour.
This new one here is 4 ‘shades’ apart for each colour:
Is the road perpetually straight or will there twists and turns.
And will the road be randomly generated or will there be a map?
(Has an impact on what options are available.)
You can skip most of it and head straight to the ‘Implementation’ section.
Upon reading it I feel kind of cheated because I suspect racing games that I’ve played are doing something similar, but it’s an interesting approach.
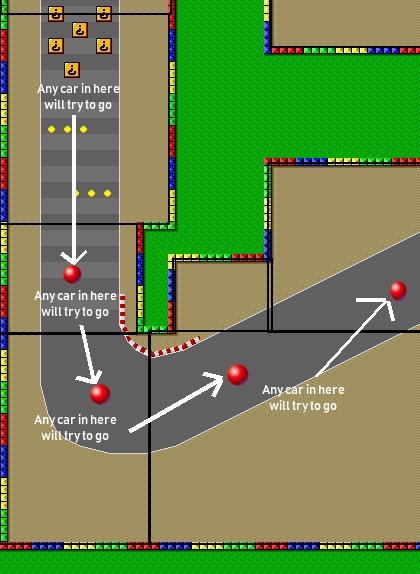
I think for MarioKart, the track are split into rectangle regions, each having a destination point within the next region. So an npc is always driving towards the ‘next’ region. Something like this…
(Probably the scruffiest thing I’ve drawn in a while.)
Basically it should be possible to calculate:
A way for a car to overtake the player
A way for a car to avoid colliding with the player
A way for a car to correct its path after having to dodge the player
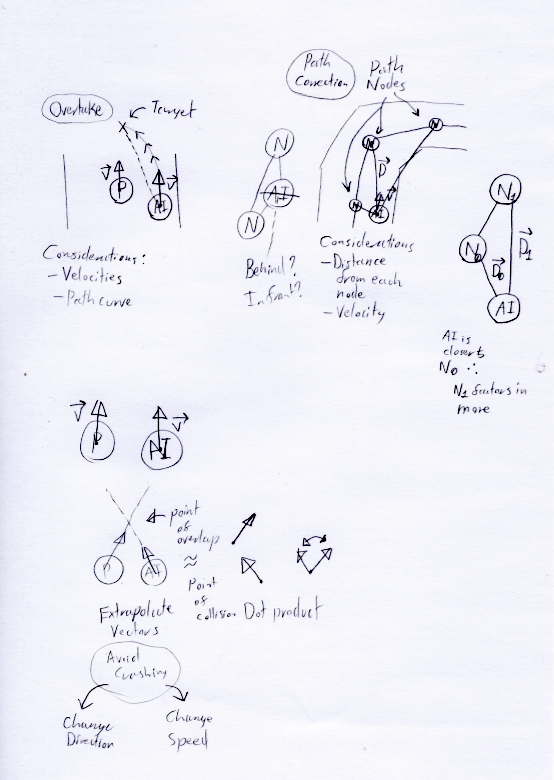
Most of which use velocity vectors.
The ‘path correction’ requires a node map (a list of points would suffice, perhaps with weights or vectors for creating curves/interpolating).
I haven’t actually figured out and of the maths involved, these are just ideas off the top of my head, but I’m reasonably convinced that they’re possible.
And obviously the AI is going to need to be a sort of state machine, perhaps built with a sort of ‘strategy pattern’ to make it easier to change the behaviour.
A lot of good ideas! A picture always makes it clearer to me.
I think that the first step would be just placing waypoints/control points/destination points throughout the course. Each waypoint contains the position (obviously), speed, and rotation vectors. Then I just interpolate each vector between the current state and the waypoint. The problem would be that the ships are going one after another throught the same route, but that can be helped by having some randomness on how fast they interpolate.
After that more AI can be added.
Also I was thinking to try to add some (simple) audio early in the development, to see how much it affects to the performance.
Btw. I have now done a very fast scaling and blitting implementation of an arbitrary bitmap, which can be used to scale npc ships and other objects in the horisont. Maybe also mipmapping is of better use there.
(Sorry for the text wall. This one really will be my last post for today.)
Do you mean a normalised direction vector?
See in my top right diagram I’ve got the AI factoring in both the current target node and the next target node and it’s encorporating the positions of both into its vector calculations.
The idea is that you want the cars to naturally try to avoid each other by looking at each other’s velocities (i.e. direction) and calculating how to move away from each other (let’s call that the ‘avoid’ state).
That in itself should make them deviate slightly from the path.
Once they’re sufficiently far away from any other cars, they switch back to gradually manoeuvring themselves back towards the path (let’s call that the ‘target’ or ‘path’ state).
But rather than just looking at the next node and travelling straight towards that, they look at both the next node and the one after that and mix the two (e.g. lerp/slerp the vectors).
The mixing should make the movement slower and slightly more angled/curved.
(Should being the key word - this is all just theory.)
But anyway, you get the idea - the collision avoidance system should cause them to deviate from the path because the decision to avoid each other necessitates being less strict about following the path.
If that’s not good enough though, you could give each car a slightly different path, either hand made or by interpolating nodes between the edges of the road somehow…
One last thing.
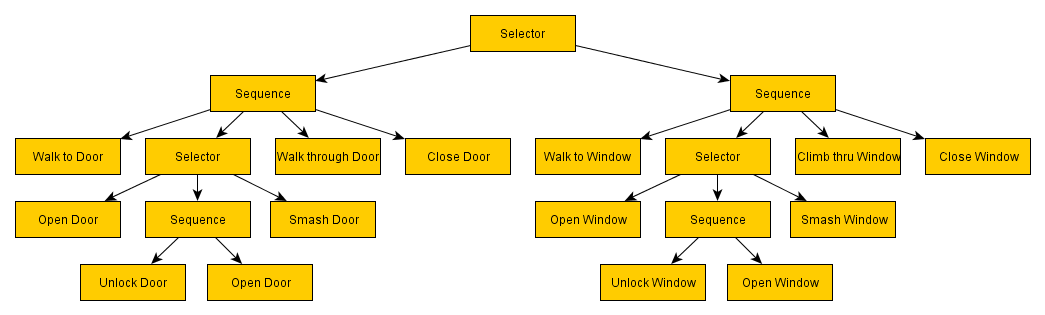
All this talking about how they should be behaving reminded me of a technique for building flexible but complex AIs.
You may or may not have heard of them before.